
PT
Valid for serial no. 222-xxx-xxxx0461 314 001 PT 20130531
Aristo
Retrofit I/O Interface
Universal 255
Manual de instruções

- 2 -

- 3 -
TOCp
Reservamo-nos o direito de alterar as especificações sem aviso prévio.
1 SEGURANÇA 4......................................................
2 INTRODUÇÃO 6.....................................................
2.1 Equipamento 6.............................................................
3 DADOS TÉCNICOS 6.................................................
4 INSTALAÇÃO 6......................................................
4.1 Localização 7...............................................................
4.2 Instruções para ligação 8.....................................................
Outros 8.........................................................................
5 FUNCIONAMENTO 9.................................................
5.1 Ligações e dispositivos de controlo 9..........................................
6 MANUTENÇÃO 10....................................................
6.1 Inspeção e limpeza 10........................................................
7 DETEÇÃO DE AVARIAS 10............................................
8 ENCOMENDAR PEÇAS SOBRESSELENTES 10.........................
9 CONNECTION & FUNCTION DESCRIPTION OF I/O SIGNALS 11..........
9.1 Connection table for I/O signals on robot side 11.................................
9.2 Input data I/O signals from robot controller to welding equipment 13.................
9.3 Output data I/O signals from the welding equipment to the robot controller 15........
ESQUEMA 16...........................................................
NÚMEROS DE REFERÊNCIA 18..........................................
ACESSÓRIOS 19........................................................

© ESAB AB 2013
- 4 -
br08d1p
1 SEGURANÇA
São os utilizadores de equipamento ESAB a quem em última análise cabe a responsabilidade de
assegurar que qualquer pessoa que trabalhe no equipamento ou próximo do mesmo observe
todas as medidas de precaução de segurança pertinentes. As medidas de precaução de segu
rança devem satisfazer os requisitos que se aplicam a este tipo de equipamento. Além dos regu
lamentos normais aplicáveis ao local de trabalho, devem observar-se as seguintes recomenda
ções.
Todo o trabalho deve ser executado por pessoal especializado, bem familiarizado com o funcio
namento do equipamento. O funcionamento incorrecto do equipamento pode resultar em situa
ções perigosas que podem dar origem a ferimentos no operador e danos no equipamento.
1. Qualquer pessoa que utilize o equipamento de soldadura deve estar familiarizado com:
S a operação do mesmo
S o local das paragens de emergência
S o seu funcionamento
S as medidas de precaução de segurança pertinentes
S o processo de soldadura e o corte
2. O operador deve certificar-se de que:
S nenhuma pessoa não autorizada se encontra dentro da área de funcionamento do equi
pamento quando este é posto a trabalhar.
S ninguém está desprotegido quando se forma o arco
3. O local de trabalho tem de:
S ser adequado à finalidade em questão
S não estar sujeito a correntes de ar
4. Equipamento de segurança pessoal
S Use sempre o equipamento de segurança pessoal recomendado como, por exemplo,
óculos de segurança, vestuário à prova de chama, luvas de segurança.
S Não use artigos soltos como, por exemplo, lenços ou cachecóis, pulseiras, anéis, etc.,
que poderiam ficar presos ou provocar queimaduras.
5. Medidas gerais de precaução
S Certifique-se de que o cabo de retorno está bem ligado.
S O trabalho em equipamento de alta tensão só será executado por um electricista qua
lificado.
S O equipamento de extinção de incêndios apropriado tem de estar claramente identificado
e em local próximo.
S A lubrificação e a manutenção não podem ser executadas no equipamento durante o seu
funcionamento.
PT

© ESAB AB 2013
- 5 -
br08d1p
Leia e compreenda o manual de instruções antes de instalar ou utilizar a unidade.
A soldadura por arco eléctrico e o corte podem ser perigosos para si e para as outras pessoas.
Tenha todo o cuidado quando soldar e cortar. Peça as práticas de segurança do seu empregador
que se devem basear nos dados de perigo fornecidos pelos fabricantes.
CHOQUE ELÉCTRICO - Pode matar
S Instale e ligue à terra a unidade de soldadura de acordo com as normas aplicáveis.
S Não toque em peças eléctricas ou em eléctrodos com carga com a pele desprotegida, com luvas
molhadas ou roupas molhadas.
S Isole-se a si próprio, e à peça de trabalho, da terra.
S Certifique-se de que a sua posição de trabalho é segura.
FUMOS E GASES - Podem ser perigosos para a saúde
S Mantenha a cabeça afastada dos fumos.
S Utilize ventilação e extracção no arco, ou ambos, para manter os fumos e os gases longe da sua
zona de respiração e da área em geral.
RAIOS DO ARCO - Podem ferir os olhos e queimar a pele
S Proteja os olhos e o corpo. Utilize as protecções para soldadura e lentes de filtro correctas e use
vestuário de protecção.
S Proteja as pessoas em volta através de protecções ou cortinas adequadas.
PERIGO DE INCÊNDIO
S As faíscas (fagulhas) podem provocar incêndios. Por isso, certifique-se de que não existem mate
riais inflamáveis por perto.
RUÍDO - O ruído excessivo pode provocar danos na audição
S Proteja os ouvidos. Utilize protectores auriculares ou outro tipo de protecção auricular.
S Previna as outras pessoas contra o risco.
AVARIAS - Peça a assistência de um perito caso surja uma avaria.
PROTEJA-SE A SI E AOS OUTROS!
AVISO
CUIDADO!
Leia e compreenda o manual de instruções
antes de instalar ou utilizar a unidade.
CUIDADO!
Este produto foi concebido exclusivamente para soldadura por arco eléctrico.
Eliminação de equipamento electrónico nas instalações de reciclagem!
De acordo com a Directiva Europeia 2002/96/CE relativa a resíduos de
equipamentos eléctricos e electrónicos e respectiva implementação em
conformidade com o direito nacional, o equipamento eléctrico e/ou electrónico que
atingiu o fim da sua vida útil deve ser eliminado em instalações de reciclagem.
Como responsável pelo equipamento, faz parte das suas funções informar-se sobre
estações de recolha aprovadas.
Para mais informações, contacte o revendedor mais perto de si.
A ESAB pode fornecer-lhe toda a protecção e acessórios de soldadura
necessários.
PT

© ESAB AB 2013
- 6 -
br08d1p
2 INTRODUÇÃO
A interface de E/S de retromodificação Universal 255 verifica e converte os sinais
do bus de CAN provenientes da fonte de alimentação para o robô de soldadura e é
utilizada para fontes de alimentação controladas por bus de CAN, tais como Mig
4000i ou Mig 5000i com E/S U8
2
.
A interface de E/S de retromodificaçãoUniversal 255 converte sinais analógicos e
digitais para comunicação de bus de campo (CAN) e sinais de bus de campo para
sinais digitais e analógicos.
2.1 Equipamento
A interface de E/S de retromodificação Universal 255 é fornecida com um manual
de instruções, cabo de controlo e ficha de manga de 48 pinos e cabo 0 que faz a
ligação entre a interface e o armário do robô.
A ESAB pode fornecer-lhe toda a protecção e acessórios de soldadura
necessários.
3 DADOS TÉCNICOS
Interface de E/S de retromodificação Universal 255
Tensão de rede (do robô) 24 V CC
Fusível 1 A
Ligação do robô Terminal de ligação de 48 pinos
Peso 6,1 kg
Dimensões (c x l x a) 365 x 351 x 110 mm
Classe de blindagem IP23
Classe de blindagem
O código IP indica a classe do revestimento, isto é, o grau de protecção contra a penetração de ob
jectos sólidos ou de água. O equipamento marcado IP 23 foi concebido para ser utilizado no interior
e no exterior.
4 INSTALAÇÃO
A instalação deve ser efectuada por um profissional.
CUIDADO!
Este produto foi concebido para utilização industrial. Em ambientes domésticos este
produto pode provocar interferências de rádio. É da responsabilidade do utilizador tomar
as precauções adequadas.
AVISO!
Quando se solda num ambiente com grandes perigos eléctricos, só podem ser
utilizadas fontes de alimentação destinadas a este tipo de ambientes. Estas fontes
de alimentação estão marcadas com o símbolo .
PT

© ESAB AB 2013
- 7 -
br08d1p
4.1 Localização
A interface de E/S de retromodificação Universal 255 está instalada acima da
fonte de alimentação. Retire o tapete de borracha (C) na fonte de alimentação e
depois faça deslizar a flange da caixa da interface (A) para dentro dos perfis (B) da
fonte de alimentação, ver ilustração abaixo.
IMPORTANTE! Aperte os 3 parafusos nos lugares respetivos na parte da frente da
caixa da interface, com força suficiente para que se faça a ligação elétrica. Verifique
se a ligação elétrica foi estabelecida.
PT

© ESAB AB 2013
- 8 -
br08d1p
4.2 Instruções para ligação
Estão disponíveis descrições completas da fonte de alimentação/da unidade de
alimentação de fio em manuais de instruções separados.
1 Cabos de ligação da fonte de alimentação
de soldadura para a unidade de
alimentação do fio.
4 Aristo U8
2
2 Ligação do bus CAN (Burndy 12 pinos) da
fonte de alimentação de soldadura para
Interface E/S
.
5 Ligação entre a unidade da fonte de
alimentação e o armário do robô (cabo po
tencial 0V)
3 Cabo de controlo entre a interface de E/S
de retromodificação
Universal 255 e o controlador do robô
Outros
Cabo 0, 6 mm
2
S O cabo 0, 6 mm
2
entre a fonte de alimentação e a cabina do robô é fornecido em extensões
de 15 m e tem de ser cortado com o comprimento necessário para a instalação.
Tempo de arranque
S O tempo de arranque da caixa de interface quando a corrente/alimentação está ativada
pode ser atrasado até 1 minuto.
PT

© ESAB AB 2013
- 9 -
br08d1p
5 FUNCIONAMENTO
Os regulamentos gerais de segurança para o manuseamento do equipamento
encontram-se na página 4. Leia-os com atenção antes de começar a utilizar o
equipamento!
5.1 Ligações e dispositivos de controlo
1 Luz indicadora (BRANCA), fonte de
alimentação
do robô.
3 Fusível / 1A 24 V CC do robô
2 Ligação para sinais para/provenientes da
pistola de soldadura do robô (conector para
terminal de 48 pinos)
4 Ligação para estação de limpeza do
maçarico
5 Ligação para cabo de acionamento
proveniente da fonte de alimentação (bus
de CAN de 12 pinos)
A interface de E/S de retromodificação Universal 255 está ligada ao armário do
robô e à fonte de alimentação.
A chapa sinalética encontra-se na
parte posterior da caixa da Interface.
PT

© ESAB AB 2013
- 10 -
br08d1p
6 MANUTENÇÃO
A manutenção regular é importante para o funcionamento seguro e fiável.
Só as pessoas com conhecimentos eléctricos adequados (pessoal autorizado) é que
podem retirar as placas de segurança.
CUIDADO!
Todas as condições de garantia do fornecedor deixam de se aplicar se o cliente tentar
realizar ele próprio qualquer trabalho no produto durante o período de garantia por forma a
rectificar quaisquer avarias.
6.1 Inspeção e limpeza
Verifique regularmente se a caixa da interface tem ligação elétrica com a fonte de
alimentação e se as ligações estão feitas corretamente e não estão avariadas.
7 DETEÇÃO DE AVARIAS
S A luz indicadora (branca) na parte da frente apagou-se?
Verifique se o fusível está intacto.
S Certifique-se de que as ligações elétricas estão corretamente situadas nos
respetivos conectores.
Estão disponíveis descrições completas da fonte de alimentação, da unidade de alimentação de fio e
do painel de controlo em manuais de instruções separados.
8 ENCOMENDAR PEÇAS SOBRESSELENTES
Os trabalhos de reparação e eléctricos deverão ser efectuados por um técnico
autorizado ESAB.
Utilize apenas peças sobresselentes e de desgaste originais da ESAB.
Os Retrofit I/O Interface Universal 255 foram construídas e testados conforme os
padrões europeus e internacionais 60974-1 e 60974-10. Depois de efectuado o serviço
ou reparação é obrigação da entidade reparadora assegurar-se de que o produto não
difere do standard referido.
As peças sobresselentes podem ser encomendadas através do seu concessionário
mais próximo da ESAB, consulte a última página desta publicação.
* * *
NOTA! 9. LIGAÇÃO E DESCRIÇÃO DA FUNÇÃO DE SINAIS DE E/S
está disponível apenas em inglês e destina-se principalmente ao integrador e à
instalação da caixa de interface na página 11.
PT

- 11 -
br08d2e
9 CONNECTION & FUNCTION DESCRIPTION OF I/O SIGNALS
The Retrofit I/O Interface Universal is the interface between the welding robot and the
welding equipment. The Retrofit I/O Interface Universal converts the robot's I/O signals to
field bus signals to the welding equipment. The Retrofit I/O Interface Universal also
converts the field bus signals from the welding equipment to I/O signals to the welding
robot.
9.1 Connection table for I/O signals on robot side
Connection Cable number
Robot side
I/O Signals
H 8 Weld on
J 9 Gas purge
K 10 Inching wire
L 11 Reverse inching
wire
M 12 Air purge
N 13 0V = Quick stop
P 14 analogue active
R 15 Touch sense
S 16 Memory 1
T 17 Memory 2
U 18 Memory 4
V 19 Memory 8
X 21 Memory 16
W 20 Memory 32
Y 22 Memory 64
Z 23 Memory 128
E 5 Voltage reference
F 6 Wirefeed reference
G 7 0V reference to
robot
a 24 Arc acknow.
b 25 Touch sense resp.
c 26 0V = Machine error
d 27 Collision detect
e 28 Weld busy
f 29 Remote active
A 1 24V supply from
robot
B 2 0V supply from
robot
Shield Shield Ground
Input
Output
Power
General
Torch
Analogue
supply
Equipment
Equipment
cleaning
Input
stop
Equipment
Welding
Welding
Welding

- 12 -
br08d2e
v 30 G-Stop
u 31 G-Stop
p 32 G-Stop
q 33 G-Stop
g 34 Lubrication
h 35 Lubrication clea
ning
i 36 Lubrication finish

- 13 -
br08d2e
9.2 Input data I/O signals from robot controller to welding
equipment
Weld ON (Cable no 8)
The signal starts the welding process, but before the welding process starts the
quick stop and stop signals are checked to ensure that they are not active.
Quick stop (Cable no 13)
The signal stops the equipment if it is active in the welding process, it carries out a
normal stop without crater filling. The function is used when a quick stop (low signal
0V) is required but it gives a normal burnback time to prevent the wire sticking in the
weld pool. The signal also blocks the start command.
Wire inching (Cable no 10)
Used when one wants to feed wire without welding voltage.
The signal starts the wire feed without the welding voltage being activated. The wire
feed unit is ramping up the wire feed speed. If the signal is active during the welding
process, the command is ignored.
If both welding and wire inching are activated at the same time the equipment will
ignore the wire inching command and start the welding process.
Gas purge (Cable no 9)
Gas flushing is used when measuring the gas flow or to flush any air or moisture
from the gas hoses before welding starts. Gas flushing is carried out without voltage
or wire feed occurring.
Welding start always activates the gas valve even if the manual gas command is
given. In the same way the gas valve for gas post flow is always closed if it is not
closed already.
Gas flushing operates parallel to the gas pre-flow and gas post-flow functions. To
control the welding gas from the robot, set the gas pre-flow to minimum and the gas
post-flow to maximum, and then control the welding gas using the gas flushing
functions.
Air purge (Cable no 12)
The signal controls the valve for air cleaning welding spatter.
Touch sense (Cable no 15)
This command is used by the robot to sense where the wire is.
When the function is active, the power source will give out current limited, idle
voltage to see if the wire is in contact with the workpiece. On contact, the output
signal ”Touch sense response” is activated.

- 14 -
br08d2e
Analogue Active (Not availabe for the moment)
The signal is used to switch between the analogue and digital remote modes.
Analogue Active allows analogue control of the welding parameters, voltage, arc
voltage and the wire feed speed.
If the welding method SuperPulse is to be used, the ”analogue active” signal must be
deactivated.
When the analogue method is activated the power source will not use the preset
values for wire feed speed and voltage when new welding data is selected. When
”analogue active” is activated the robot controls arc voltage and wire feed speed
using analogue signals.
With the analogue active signal deactivated, welding data is exchanged with preset
welding data such as voltage, wire feed speed to fixed set welding parameters.
The pre-programmed welding data (schedules) is requested from the control box
U8
2
welding data memory.
Welding data (Memory) (Cable 16-23)
With the signals memory 1, 2, 4, 8, 15, 32, 64, 128 one accesses saved welding data
(schedules) in U8
2
I/O.
The binary coded combinations of these signals can be used to recall the memories
1-255 in the U8
2
I/O memory bank.
A complete set of welding data includes all settings that can be made in U8
2
I/O, see
the instruction manual for U8
2
.
Voltage reference (Cable no 5 - Not available at the moment)
This signal is used by the robot for analogue control of the welding voltage if
analogue active is selected. It stretches from 0-10V and corresponds to welding
voltage socket as follows.
0V reference gives a deviation on the selected arc voltage of -10V
10V reference gives a deviation on the selected arc voltage of +10V
If the machine is in non-synergy mode, the equipment will use the appreciated value.
0V reference gives arc voltage 8V
10V reference gives arc voltage 60V
Wire feed speed reference signal (Cable no 6 - Not available at the moment)
The signal is used by the robot to make analogue adjustments to the wire feed
speed. The internal solution is 0.1 m/min.
Input voltage
0 V Mini. value for wire feed (normally 0.8 m/min) (RoboFeed)
10 V Max. value for wire feed (normally 30 m /min)

- 15 -
br08d2e
9.3 Output data I/O signals from the welding equipment to the
robot controller
Arc acknowledge (Cable no 25)
The signal is activated after established welding start if the voltage and current
strength lie within weldable limits. The signal disappears if welding cannot be
established.
The criterion for establishing a welding arc is that the process control has passed the
start- procedure, which means that only a short circuit is not sufficient to meet the
criteria. Normal delay from the first contact, which is acknowledged by the welding
arc (wire feed time for this after the first contact is established ) is in the range of 2 to
20 ms. If there is a poor start to the welding arc the ”Arc acknowledge” is further
delayed.
Touch sense response (Cable no 26)
This signal indicates contact in the welding circuit, i.e. that the wire is in contact with
the workpiece. To obtain ”touch sense response” the ”touch sense” input signal must
be activated.
Collision detect (Cable no 26)
The signal comes via the internal CAN bus from the feeding mechanism (RoboFeed).
The signal indicates that the robot's breaker has activated. The interface activates a
relay which breaks two safety loops from the robot, at which the robot orders a quick
stop of both robot and the welding equipment.
The output is high when the welding gun breaker is tripped (the signal is sent to the
robot).
Machine error (Cable no 27)
The signal is low (0V) when an error has been detected in the welding equipment.
Weld busy (Cable no 28)
This signal indicates when the welding equipment is occupied with welding. The
signal can be configurated in the U82 I/O configuration menu.
Remote active (Cable no 29)
Remote active is activated when remote is chosen in U8
2
.
General stop (Cable no 30-33)
Can be used as an electrical stop, to stop the servo motors on the robot, when
collision detect signal is low (0V).

© ESAB AB 2013
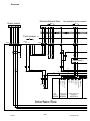
Esquema
Com 0V
Com 0V
Wire 0-10V
Voltage 0-10V
0V
CAN HIGH
CAN LOW
24VR
0VR
24VR
0VR
Reserve
Reserve
Remote Active
Weld Busy
Filter board 1
Digital output from
equipment
Bus
resistor
External General Stop
Torch cleaner
C1
D
XS04
24VR
E
0VR
C B A
X1
X2
HL1
024023
3
4
R2
026025
5
6
A1
A2
R1
414
154
KL3062
101
603
102
505
103
401
XP01
A
X5
3
X5
1 2
B K L E G
i
XS03
h g G F E
45
J4
6
J1
1 2 3
53 17
KL9010
Power source
A
XS01
B K L E G
4
XP03
i h g v u p q
v u p q
224 223 221
222114
201
A1
A2
R2
022
G F E
W1
33323130
567
343536
KL2134:2
14 583276
612
711
815
27
d
d
315
613
712
415
615
614
714
713
X6
1 2 3 4
616
715
X7
1
2
Analog input
to equipment
Interface Box
Not available at the moment
- 16 -
br08dia

© ESAB AB 2013
24VR
0VR
24VR
0VR
Collision Detect
Machine Error=0V
Tourch Sense R.
Arc Acknowledge
Memory 8
Memory 4
Memory 2
Memory 1
Wire Feeder
Reserve
Reserve
Tourche Sense
Reserv
Analog Active
Quick Stop
Air Purque
Reverse Wire
Inching
Gas Purge
Weld On
0V
CAN LOW
CAN HIGH
Memory 128
Memory 64
Memory 32
Memory 16
Reserve
Reserve
Reserve
Reserve
Filter board 2
Filter board 1
Digital input to
equipment
Digital input to
equipment
Digital input to
equipment
Digital output from
equipment
Robot
AP1
KL2134:1
104
304
105205
106
1001
KL1408:2
001
1808
002
1704
003
1607
004
1503
008
1101
KL1408:1
111
3
4
R1
011807
012
703
014
502
015405
016
301
BK5151
017
200
218
A1
A2
FU1
1A
018
124
c b a V U T S R N M K J H B A
123
J5
18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3
J6
2 1
4 5 6
J2
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
J3
2 1
-+
24
V
0
V
12 56374812 56374814 583276
W2
4 3 1
Interface Box
7 2 3
N M K J H B Ac b a V U T S R
16171819
242526
606
904
15
13 12 10 9
8
2
1
14
11
LP
LP
010
013
28
e
e
29
f
f
005
1405
220302
12 563748
KL1408:3
AP1
AP2
J2
1
5
1
6
1
7
1
8
J5
4 3 2 1
Z Y X
Z Y X
212223 20
W
W
1504
1603
1701
1801
1806
1702
1605
1501
202
203
Shield
- 17 -
br08dia

Retrofit I/O Interface Universal 255
© ESAB AB 2013
Números de referência
- 18 -
br08o
Ordering no. Denomination Notes
0461 090 884 Retrofit I/O Interface Universal 255 Includes the Control cables, see on
page 19 and a Instruction manual.
0461 314 001 Instruction manual Retrofit I/O Interface Universal 255
0459 839 091 Spare parts list Retrofit I/O Interface Universal 255

Retrofit I/O Interface Universal 255
© ESAB AB 2013
Acessórios
- 19 -
br08acc
Aristo
[
U8
2+
I/O ........................... 0460 820 883
Rebuilding kit Incl. Adapter (12 pole to 10 pole) .
Mig 4002, 5002 and 6502
0461 322 880
Extension cable (U8
2
, 7,5 m) ................. 0460 877 891
Control cable
Retrofit I/O to power source (1,7 m) ........... 0461 319 880 *
Control cable (7,5 m, 48-pole) ................. 0461 321 880
* Included in 0461 090 884 Retrofit I/O Interface Universal 255

www.esab.com
110915© ESAB AB
ESAB subsidiaries and representative offices
Europe
AUSTRIA
ESAB Ges.m.b.H
Vienna-Liesing
Tel: +43 1 888 25 11
Fax: +43 1 888 25 11 85
BELGIUM
S.A. ESAB N.V.
Heist-op-den-Berg
Tel: +32 70 233 075
Fax: +32 15 257 944
BULGARIA
ESAB Kft Representative Office
Sofia
Tel/Fax: +359 2 974 42 88
THE CZECH REPUBLIC
ESAB VAMBERK s.r.o.
Vamberk
Tel: +420 2 819 40 885
Fax: +420 2 819 40 120
DENMARK
Aktieselskabet ESAB
Herlev
Tel: +45 36 30 01 11
Fax: +45 36 30 40 03
FINLAND
ESAB Oy
Helsinki
Tel: +358 9 547 761
Fax: +358 9 547 77 71
FRANCE
ESAB France S.A.
Cergy Pontoise
Tel: +33 1 30 75 55 00
Fax: +33 1 30 75 55 24
GERMANY
ESAB GmbH
Solingen
Tel: +49 212 298 0
Fax: +49 212 298 218
GREAT BRITAIN
ESAB Group (UK) Ltd
Waltham Cross
Tel: +44 1992 76 85 15
Fax: +44 1992 71 58 03
ESAB Automation Ltd
Andover
Tel: +44 1264 33 22 33
Fax: +44 1264 33 20 74
HUNGARY
ESAB Kft
Budapest
Tel: +36 1 20 44 182
Fax: +36 1 20 44 186
ITALY
ESAB Saldatura S.p.A.
Bareggio (Mi)
Tel: +39 02 97 96 8.1
Fax: +39 02 97 96 87 01
THE NETHERLANDS
ESAB Nederland B.V.
Amersfoort
Tel: +31 33 422 35 55
Fax: +31 33 422 35 44
NORWAY
AS ESAB
Larvik
Tel: +47 33 12 10 00
Fax: +47 33 11 52 03
POLAND
ESAB Sp.zo.o.
Katowice
Tel: +48 32 351 11 00
Fax: +48 32 351 11 20
PORTUGAL
ESAB Lda
Lisbon
Tel: +351 8 310 960
Fax: +351 1 859 1277
ROMANIA
ESAB Romania Trading SRL
Bucharest
Tel: +40 316 900 600
Fax: +40 316 900 601
RUSSIA
LLC ESAB
Moscow
Tel: +7 (495) 663 20 08
Fax: +7 (495) 663 20 09
SLOVAKIA
ESAB Slovakia s.r.o.
Bratislava
Tel: +421 7 44 88 24 26
Fax: +421 7 44 88 87 41
SPAIN
ESAB Ibérica S.A.
Alcalá de Henares (MADRID)
Tel: +34 91 878 3600
Fax: +34 91 802 3461
SWEDEN
ESAB Sverige AB
Gothenburg
Tel: +46 31 50 95 00
Fax: +46 31 50 92 22
ESAB international AB
Gothenburg
Tel: +46 31 50 90 00
Fax: +46 31 50 93 60
SWITZERLAND
ESAB AG
Dietikon
Tel: +41 1 741 25 25
Fax: +41 1 740 30 55
UKRAINE
ESAB Ukraine LLC
Kiev
Tel: +38 (044) 501 23 24
Fax: +38 (044) 575 21 88
North and South America
ARGENTINA
CONARCO
Buenos Aires
Tel: +54 11 4 753 4039
Fax: +54 11 4 753 6313
BRAZIL
ESAB S.A.
Contagem-MG
Tel: +55 31 2191 4333
Fax: +55 31 2191 4440
CANADA
ESAB Group Canada Inc.
Missisauga, Ontario
Tel: +1 905 670 02 20
Fax: +1 905 670 48 79
MEXICO
ESAB Mexico S.A.
Monterrey
Tel: +52 8 350 5959
Fax: +52 8 350 7554
USA
ESAB Welding & Cutting Products
Florence, SC
Tel: +1 843 669 44 11
Fax: +1 843 664 57 48
Asia/Pacific
AUSTRALIA
ESAB South Pacific
Archerfield BC QLD 4108
Tel: +61 1300 372 228
Fax: +61 7 3711 2328
CHINA
Shanghai ESAB A/P
Shanghai
Tel: +86 21 2326 3000
Fax: +86 21 6566 6622
INDIA
ESAB India Ltd
Calcutta
Tel: +91 33 478 45 17
Fax: +91 33 468 18 80
INDONESIA
P.T. ESABindo Pratama
Jakarta
Tel: +62 21 460 0188
Fax: +62 21 461 2929
JAPAN
ESAB Japan
Tokyo
Tel: +81 45 670 7073
Fax: +81 45 670 7001
MALAYSIA
ESAB (Malaysia) Snd Bhd
USJ
Tel: +603 8023 7835
Fax: +603 8023 0225
SINGAPORE
ESAB Asia/Pacific Pte Ltd
Singapore
Tel: +65 6861 43 22
Fax: +65 6861 31 95
SOUTH KOREA
ESAB SeAH Corporation
Kyungnam
Tel: +82 55 269 8170
Fax: +82 55 289 8864
UNITED ARAB EMIRATES
ESAB Middle East FZE
Dubai
Tel: +971 4 887 21 11
Fax: +971 4 887 22 63
Africa
EGYPT
ESAB Egypt
Dokki-Cairo
Tel: +20 2 390 96 69
Fax: +20 2 393 32 13
SOUTH AFRICA
ESAB Africa Welding & Cutting Ltd
Durbanvill 7570 - Cape Town
Tel: +27 (0)21 975 8924
Distributors
For addresses and phone
numbers to our distributors in
other countries, please visit our
home page
www.esab.com
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20




















ESAB Aristo® Retrofit I/O Interface Universal 255 Manual do usuário
- Tipo
- Manual do usuário
- Este manual também é adequado para
em outras línguas
Artigos relacionados
-
ESAB Retrofit I/O Interface Motoman – Aristo® - For Motoman Manual do usuário
-
ESAB Retrofit I/O Interface Robot S3 A350 - Aristo® For ABB Manual do usuário
-
ESAB W82 Manual do usuário
-
ESAB U82 Aristo Manual do usuário
-
ESAB Mig 4004i Pulse Manual do usuário
-
-
-
-
-