
Rev.1 EM208S4467F
EPSON RC+ 7.0
Referência da Linguagem
SPEL
+
Ver.7.5
CPD-60427

EPSON RC+ 7.0 Referência da linguagem SPEL+ Rev. 1

EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1 i
EPSON RC+ 7.0 (Ver.7.5)
Referência da Linguagem SPEL
+
Rev.1
Copyright © 2012-2020 SEIKO EPSON CORPORATION. Todos os direitos reservados.

ii EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1
PREFÁCIO
Obrigado por adquirir nossos produtos robóticos.
Este manual contém as informações necessárias para o uso correto do software do EPSON
RC+ 7.0.
Leia cuidadosamente este manual e os outros manuais relacionados antes de instalar o
sistema robótico.
Mantenha sempre este manual à mão para fácil acesso.
GARANTIA
O robô e suas partes opcionais são entregues a nossos clientes somente após serem
submetidos aos mais rígidos controles de qualidade, testes e inspeções para certificar sua
conformidade com nossos altos padrões de desempenho.
Os defeitos do produto resultantes do manuseio ou operação normal serão reparados sem
custos durante o período de garantia normal. (Entre em contato com o fornecedor de sua
região para informações sobre o período de garantia).
No entanto, os clientes serão cobrados pelos reparos nos seguintes casos (mesmo se estes
ocorrerem durante o período de garantia):
1.
Avaria ou mau funcionamento causado por uso inadequado que não esteja descrito no
manual, ou uso descuidado.
2.
Defeitos causados por desmontagem não autorizada realizada pelo cliente.
3.
Avaria devido a ajustes ou tentativas de reparo inadequadas.
4.
Avaria causada por desastres naturais, tal como terremoto, enchente, etc.
Avisos, Cuidados, Uso:
1.
Se o robô ou o equipamento associado for utilizado fora das condições de uso e
especificações do produto descritas nos manuais, esta garantia fica sem efeito.
2.
Se não forem seguidos os AVISOS e CUIDADOS contidos neste manual, não poderemos
nos responsabilizar por qualquer mau funcionamento ou acidente, mesmo se o resultado
for ferimento ou morte.
3.
Não podemos prever todos os perigos e consequências possíveis. Portanto, este manual
não pode avisar o usuário de todos os perigos possíveis.

EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1 iii
MARCAS REGISTRADAS
Microsoft, Windows, o logotipo do Windows, Visual Basic e Visual C++ são marcas
comerciais registradas ou marcas comerciais da Microsoft Corporation nos Estados Unidos
e/ou outros países. Pentium é uma marca comercial da Intel Corporation. Outras marcas e
nomes de produtos são marcas comerciais ou marcas comerciais registradas dos respectivos
detentores.
REPRESENTAÇÃO DAS MARCAS REGISTRADAS NESTE
MANUAL
Sistema operacional Microsoft® Windows® 8
Sistema operacional Microsoft® Windows® 10
Em todo este manual, Windows 8 e Windows 10 referem-se aos respectivos sistemas
operacionais acima. Em alguns casos, Windows refere-se genericamente ao Windows 8 e
Windows 10.
AVISO
Nenhuma parte deste manual pode ser copiada ou reproduzida sem autorização.
O conteúdo deste manual está sujeito a alteração sem aviso.
Favor notificar-nos se encontrar algum erro neste manual ou se tiver algum comentário
relacionado ao seu conteúdo.
FABRICANTE
INFORMAÇÕES PARA CONTATO
As informações para contato são descritas em “FORNECEDORES” nas páginas iniciais do
seguinte manual:
Sistema robótico Segurança e instalação Leia este manual primeiro

iv EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1
PRECAUÇÕES DE SEGURANÇA
A instalação dos robôs e do equipamento robótico só deve ser feita por pessoal
qualificado, de acordo com os códigos nacionais e locais. Leia cuidadosamente este
manual e os outros manuais relacionados ao utilizar este software.
Mantenha sempre este manual em local à mão para fácil acesso.
ATENÇÃO
Este símbolo indica que existe um perigo de possível
lesão séria ou morte se as instruções associadas não
forem seguidas corretamente.
CUIDADO
Este aviso indica que existe o perigo de possível
ferimento nas pessoas ou dano físico no equipamento e
nas instalações se as instruções associadas não forem
seguidas corretamente.

Índice
EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1 v
Resumo dos comandos do SPEL+ 1
Comandos de gerenciamento do sistema ..................................................... 1
Comandos de controle do robô...................................................................... 2
Comandos de torque...................................................................................... 7
Comandos de entrada/saída .......................................................................... 7
Comandos de gerenciamento de ponto......................................................... 9
Comandos de alteração das coordenadas .................................................. 10
Comandos de controle do programa ............................................................ 11
Comandos de execução do programa ........................................................ 12
Pseudoinstruções ........................................................................................ 12
Comandos de gerenciamento de arquivos .................................................. 13
Comandos do Fieldbus ................................................................................ 14
Comandos de valor numérico ...................................................................... 14
Comandos de string ..................................................................................... 15
Operadores lógicos ..................................................................................... 15
Comandos de variáveis ............................................................................... 16
Comandos de segurança ............................................................................ 16
Comandos de rastreamento do transportador ............................................. 16
Comandos de detecção de força ................................................................. 17
Comandos de bancos de dados .................................................................. 17
Comandos do gerador de pulso .................................................................. 17
Comandos de detecção de colisão .............................................................. 17
Comandos de consumo de peças ............................................................... 18
Comandos do simulador .............................................................................. 19
Referência da Linguagem SPEL+ 20
Mensagens de erro do SPEL+ 793
Apêndice A
: Lista de condições de uso dos comandos do SPEL+
929
Apêndice B: Precauções de compatibilidade 939
B-1 : Precauções de compatibilidade com o EPSON RC+ 6.0 .............. 939
B-2 : Precauções de compatibilidade do EPSON RC+ 5.0 .................... 949
B-3 : Precauções de compatibilidade com o EPSON RC+ Ver.4.* ........ 960

Índice
vi EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1
Apêndice C: Comandos do EPSON RC +7.0 971
C-1 : Lista dos comandos adicionados do EPSON RC+4.0 ou posterior ......... 971
C-2 : Lista de comandos adicionados para cada versão do EPSON RC+ 7.0 ..... 974
C-3 : Comandos de exclusão (classificados por versão) .................................. 980

Resumo dos comandos do SPEL+
EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1 1
Resumo dos comandos do SPEL
+
O que segue é um resumo dos comandos do SPEL+.
Comandos de gerenciamento do sistema
Reset Restaura o controlador.
SysConfig Exibe a configuração do controlador.
SysErr Retorna o último estado de erro ou de advertência.
Date Define a data do sistema.
Time Define a hora do sistema.
Date$ Retorna a data do sistema na forma de uma string.
Time$ Retorna a hora do sistema na forma de uma string.
Hour Exibe /retorna a hora de operação do controlador.
Stat Retorna os bits de estado do controlador.
CtrlInfo Retorna as informações do controlador.
RobotInfo Retorna as informações do robô.
RobotInfo$ Retorna as informações do robô em texto.
TaskInfo Retorna as informações da tarefa.
TaskInfo$ Retorna as informações da tarefa em texto.
DispDev Define o dispositivo de exibição atual.
EStopOn Retorna o estado da parada de emergência.
CtrlDev Retorna o número do dispositivo de controle atual.
Cls Limpa a área de texto das janelas Run (Executar), Operator
(Operador) ou Command (Comando) do EPSON RC+ 6.0.
Limpa o painel de impressão TP.
Toff Desativa a exibição da linha de execução na tela LCD.
Ton Especifica uma tarefa que mostra uma linha de execução na tela
LCD.
SafetyOn Retorna o estado de abertura da porta de segurança.
Eval Executa uma instrução da janela Command de um programa e retorna
o estado de erro.
ShutDown Encerra o EPSON RC+ e opcionalmente encerra ou reinicia o
Windows.
TeachOn Retorna o estado do modo Teach (Ensino).
WindowsStatus Retorna o estado de inicialização do Windows.

Resumo dos comandos do SPEL+
2 EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1
Comandos de controle do robô
AIO_TrackingSet Define a função de rastreamento da distância.
AIO_TrackingStart Inicia a função de rastreamento da distância.
AIO_TrackingEnd Termina a função de rastreamento da distância.
Função AIO TrackingON Retorna o estado da função de rastreamento da distância.
AtHome Retorna se a atual orientação do robô é de estacionamento ou não.
Calib Substitui os atuais valores de pulso da postura do braço pelos atuais
valores de CalPls.
CalPls Especifica e exibe a posição e orientação dos valores de pulso para a
calibração.
Hofs Retorna os pulsos de compensação utilizados para correção do ponto
zero do software.
MCal Executa a calibração da máquina para robôs com codificadores
incrementais.
MCalComplete Retorna o estado do comando MCal.
MCordr Especifica e exibe a ordem de movimentação das articulações para
o comando MCal de calibração da máquina. Só é necessário para
robôs com codificadores incrementais.
Power Define/retorna o modo de alimentação do servo.
Motor Define/retorna o estado do motor.
Função MHour Retorna o tempo acumulado de funcionamento dos motores do robô.
SFree Remove a alimentação do servo dos eixos servo especificados.
SLock Restaura a alimentação do servo do eixos servo especificados.
SyncRobots Inicia o movimento do robô reservado.
Jump Salta para um ponto com um movimento de ponto a ponto.
Jump3 Salta para um ponto com um movimento de comporta em 3D.
Jump3CP Salta para um ponto com um movimento em 3D em percurso contínuo.
JumpTLZ Salta para um ponto com movimento de comporta em 3D.
Arch Define/retorna os parâmetros do arco para o movimento de salto.
LimZ Define o limite superior de Z para o comando Jump (Saltar).
LimZMargin Define/retorna a margem para detecção de erro quando a operação
inicia na posição acima do valor de LimZ.
Sense Define/retorna a condição para parar o manipulador acima da
coordenada alvo quando o comando Jump especifica Sense (Detectar).
JS Retorna o estado da operação Sense.
JT Retorna o estado do comando Jump mais recente para o robô atual.
Go Move o robô para um ponto usando o movimento ponto a ponto.
Pass Executa o movimento ponto a ponto simultâneo das quatro articulações,
passando próximo, mas não através dos pontos especificados.
Pulse Move o robô para uma posição definida em pulsos.
BGo Executa um movimento relativo ponto a ponto no sistema de
coordenadas local selecionado.
BMove Executa um movimento relativo de interpolação linear no sistema de
coordenadas local selecionado.

Resumo dos comandos do SPEL+
EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1 3
TGo Executa um movimento relativo ponto a ponto no sistema de coordenadas
da ferramenta atual.
TMove Executa um movimento relativo de interpolação linear no sistema de
coordenadas da ferramenta selecionada.
Till Especifica a parada do movimento quando ocorre a entrada.
TillOn Retorna o estado atual de Till.
!…! Instruções do processo durante o movimento.
Speed Define/retorna a velocidade para os comandos de movimento ponto a ponto.
Accel Define/retorna a aceleração e desaceleração para o movimento ponto a ponto.
SpeedFactor Define/retorna a velocidade para os comandos de movimento ponto a ponto.
Inertia Especifica ou exibe as configurações de inércia do braço do robô.
Weight Especifica ou exibe as configurações de peso do braço do robô.
Arc Move o braço usando a interpolação circular.
Arc3 Move o braço em 3D usando a interpolação circular.
Move Move o robô usando a interpolação linear.
Curve Define os dados e pontos necessários para mover o braço ao longo de um
percurso curvo. Podem ser definidos muitos pontos de dados no percurso
para melhorar a precisão do percurso.
CVMove Executa o movimento de percurso Spline definido pela instrução Curve.
SpeedS Define/retorna a velocidade para os comandos de movimento linear.
AccelS Define/retorna a aceleração e desaceleração para o movimento linear.
SpeedR Define/retorna a velocidade para a rotação da ferramenta.
AccelR Define/retorna a aceleração e desaceleração para a rotação da ferramenta.
AccelMax Retorna o limite do valor de aceleração máximo disponível para Accel.
Brake Ativa ou desativa o freio da articulação especificada do robô atual.
Home Move o robô para a posição de estacionamento definida pelo usuário.
HomeClr Apaga a definição da posição de estacionamento.
HomeDef Retorna o estado da definição da posição de estacionamento.
HomeSet Define a posição de estacionamento definida pelo usuário.
Hordr Define a ordem do movimento para o comando Home.
InPos Verifica se o robô está na posição (não se move).
CurPos Retorna a posição atual enquanto se move.
TCPSpeed Retorna a velocidade calculada do ponto central da ferramenta atual.
Pallet Define um palete ou retorna um ponto de palete.
PalletClr Apaga a definição de um palete.
Fine Especifica e exibe os limites de erro de posicionamento. (Unidade: pulso)
FineDist Especifica e exibe os limites de erro de posicionamento (Unidade: mm)
Função FineStatus Retorna se o número inteiro usa Fine ou FineDist.

Resumo dos comandos do SPEL+
4 EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1
QP Define/retorna o estado Quick Pause (Pausa rápida).
QPDecelR Define a velocidade da desaceleração da pausa rápida para mudança da
orientação da ferramenta durante o movimento CP.
QPDecelS Define a velocidade da desaceleração da pausa rápida no movimento CP.
CP Define o modo de movimento CP (Percurso contínuo).
Box Especifica e exibe a área de verificação da aproximação.
BoxClr Apaga a definição da área de verificação da aproximação.
BoxDef Retorna se Box (Caixa) está definido ou não.
Plane Especifica e exibe o plano de verificação da aproximação.
PlaneClr Apaga (torna nula) uma definição de Plane (Plano).
PlaneDef Retorna a configuração do plano de verificação da aproximação.
InsideBox Retorna o estado de verificação da área de verificação da aproximação.
InsidePlane Retorna o estado de verificação do plano de verificação da aproximação.
GetRobotInsideBox Retorna um robô que está na área de verificação da aproximação.
GetRobotInsidePlane Retorna um robô que está no plano de verificação da aproximação.
Find Especifica ou exibe a condição para armazenar coordenadas durante o
movimento.
FindPos Retorna um ponto do robô armazenado por Find (Localizar) durante um
comando de movimento.
PosFound Retorna o estado da operação Find.
WaitPos Aguarda que o robô desacelere e pare na posição antes de executar a
próxima instrução enquanto o movimento no percurso está ativo.
Robot Seleciona o robô atual. (Retorna o número do robô pela Função do robô)
RobotModel$ Retorna o nome do modelo do robô.
RobotName$ Retorna o nome do robô.
RobotSerial$ Retorna o número de série do robô.
RobotType Retorna o tipo de robô.
TargetOK Retorna um estado indicando se é possível ou não o movimento PTP
(Ponto a ponto) da atual posição até a posição alvo.
JRange Define/retorna os limites de articulação para uma articulação.
Range Define os limites para todas as articulações.
XYLim Define ou exibe os limites permissíveis da faixa de movimento de XY
para o robô.
XYLimClr Apaga a definição de XYLim.
XYLimDef Retorna se XYLim foi definido ou não.
XY Retorna um ponto das coordenadas individuais que pode ser usado em
uma expressão de ponto.

Resumo dos comandos do SPEL+
EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1 5
Dist Retorna a distância entre dois pontos de robô.
PTPBoost Especifica ou exibe o parâmetro do impulso algorítmico da
aceleração, desaceleração e velocidade para o movimento PTP (ponto
a ponto) a uma pequena distância.
PTPBoostOK Retorna se o movimento PTP (Ponto a ponto) da atual posição até a
posição alvo é ou não uma distância de deslocamento pequena.
PTPTime Retorna o tempo estimado para um comando de movimento ponto a
ponto sem executá-lo.
CX Define/retorna a coordenada do eixo X de um ponto.
CY Define/retorna a coordenada do eixo Y de um ponto.
CZ Define/retorna a coordenada do eixo Z de um ponto.
CU Define/retorna a coordenada do eixo U de um ponto.
CV Define/retorna a coordenada do eixo V de um ponto.
CW Define/retorna a coordenada do eixo W de um ponto.
CR Define/retorna a coordenada do eixo R de um ponto.
CS Define/retorna a coordenada do eixo S de um ponto.
CT Define/retorna a coordenada do eixo T de um ponto.
Pls Retorna o valor do pulso de uma articulação.
Agl Retorna o ângulo da articulação na posição atual.
PAgl Retorna um valor de articulação a partir de um ponto especificado.
JA Retorna um ponto de robô especificado nos ângulos de articulação.
AglToPls Converte os ângulos do robô em pulsos.
DegToRad Converte graus em radianos.
RadToDeg Converte radianos em graus.
Joint Exibe a posição atual do robô nas coordenadas de articulação.
JTran Executa um movimento relativo de uma articulação.
PTran Executa um movimento relativo de uma articulação em pulsos.
RealPls Retorna o valor do pulso da articulação especificada.
RealPos Retorna a posição atual do robô especificado.
Função RealAccel Retorna o valor de Accel (Aceleração) ajustado automaticamente por
OLAccel.
PPls Retorna a posição do pulso de um valor de articulação especificado a
partir de um ponto especificado.
LJM Function Retorna os dados de ponto dos indicadores de orientação
convertidos para permitir o movimento mínimo da articulação ao
mover para um ponto especificado baseado no ponto de referência.
AutoLJM Define Auto LJM
AutoLJM Function Retorna o estado Auto LJM
AutoOrientationFlag Muda o indicador de orientação de N6-A1000**
AutoOrientationFlag Function Retorna o estado de AutoOrientationFlag
AvoidSingularity Define a função de evasão da singularidade
AvoidSingularity Function Retorna o estado da função de evasão da singularidade
SingularityAngle Define o ângulo de aproximação da singularidade para a função de
evasão da singularidade

Resumo dos comandos do SPEL+
6 EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1
SingularityAngle Function Retorna o ângulo de aproximação da singularidade para a função
de evasão da singularidade.
SingularitySpeed Define a velocidade de aproximação da singularidade para a
função de evasão da singularidade
SingularitySpeed Function Retorna o ângulo de aproximação da singularidade para a função
de evasão da singularidade
SingularityDist Define a distância de aproximação da singularidade necessária para
a função de evasão da singularidade.
SingularityDist Function Retorna a distância de aproximação da singularidade necessária para
a função de evasão da singularidade..
AbortMotion Aborta um comando de movimento e coloca a tarefa em execução
no estado de erro.
Align Function Retorna os dados de ponto convertidos para alinhar a orientação do
robô com o eixo de coordenadas mais próximo no sistema de
coordenadas local.
AlignECP Function Retorna os dados de ponto convertidos para alinhar a orientação do
robô com o eixo de coordenadas mais próximo no sistema de
coordenadas ECP.
SoftCP Define/retorna o modo de movimento SoftCP.
SoftCP Function Retorna o estado do modo de movimento SoftCP.
Here Ensina um ponto do robô na posição atual.
Where Exibe os dados da posição atual do robô.
PerformMode Define o modo do robô.
PerformMode Function Retorna o número do modo de desempenho do robô.
VSD Define o movimento CP de velocidade variável dos robôs SCARA.
Função VSD Retorna o movimento CP de velocidade variável dos robôs SCARA.
CP_Offset Define o tempo de compensação para iniciar o comando de
movimento subsequente ao executar CP On.
Função CP_Offset Retorna o tempo de compensação para iniciar o comando de
movimento subsequente ao executar CP On.
AvgSpeedClear Apaga e inicializa a média da velocidade da articulação.
AvgSpeed Exibe a média da velocidade da articulação.
Função AvgSpeed Retorna o valor média da velocidade da articulação.
PeakSpeedClear Apaga e inicializa o pico de velocidade para uma ou mais
articulações.
PeakSpeed Exibe os valores do pico de velocidade da articulação especificada.
Função PeakSpeed Retorna o pico de velocidade da articulação especificada.

Resumo dos comandos do SPEL+
EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1 7
Comandos de torque
TC Retorna a configuração do modo de controle do torque e o modo atual.
TCSpeed Especifica o limite de velocidade no controle do torque.
TCLim Especifica o limite de torque de cada articulação para o modo de
controle do torque.
RealTorque Retorna o valor da instrução de torque atual da articulação especificada.
ATCLR Apaga e inicializa o torque médio para uma ou mais articulações.
ATRQ Exibe o torque médio da articulação especificada.
PTCLR Apaga e inicializa o torque médio para uma ou mais articulações.
PTRQ Exibe o pico de torque da articulação especificada.
OLAccel Configura o ajuste automático da aceleração/desaceleração que está
sendo ajustada.
OLRate Exibe a classificação da sobrecarga para uma ou todas as articulações
do robô atual.
LimitTorque Define/retorna o valor de torque superior no modo de potência alta.
Função LimitTorque Retorna o valor de configuração de LimitTorque.
LimitTorqueLP Define/retorna o valor de torque superior no modo de potência baixa.
Função LimitTorqueLP Retorna o valor de configuração de LimitTorqueLP.
LimitTorqueStop Especifica/retorna se o robô será detido ou não quando o torque
alcançar o limite superior no modo de potência alta.
Função LimitTorqueStop Retorna o valor de configuração de LimitTorqueStop.
LimitTorqueStopLP Especifica/retorna se o robô será detido ou não quando o torque
alcançar o limite superior no modo de potência baixa.
Função LimitTorqueStopLP Retorna o valor de configuração de LimitTorqueStopLP.
Comandos de entrada/saída
On Ativa uma saída.
Off Desativa uma saída.
Oport Lê o estado de um bit de saída.
Sw Retorna o estado da entrada.
In Lê 8 bits de entradas.
InW Retorna o estado da porta de palavra de entrada especificada.
InBCD Lê 8 bits de entradas no formato BCD.
Out Define /retorna 8 bits de entradas.
OutW Define simultaneamente 16 bits de saída.
OpBCD Define simultaneamente 8 bits de entrada no formato BCD.
MemOn Ativa um bit de memória.
MemOff Desativa um bit de memória.
MemSw Retorna o estado do bit de memória.
MemIn Lê 8 bits de I/O de memória.
MemOut Define/retorna 8 bits de memória.
MemInW
Retorna o estado da porta de palavra de I/O de memória especificada.
Cada porta de palavra contém 16 bits de I/O de memória.

Resumo dos comandos do SPEL+
8 EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1
MemOutW Define simultaneamente 16 bits de I/O de memória.
Wait Aguarda a condição ou tempo.
TMOut Define o tempo limite padrão para a instrução Wait.
Tw Retorna o estado e o intervalo do temporizador da condição Wait.
Input Recebe dados de entrada do dispositivo de visualização e
armazenados em variáveis.
InReal Lê um dado de entrada de 2 palavras (32 bits) como dado de
ponto flutuante (em conformidade com o IEEE754) de 32 bits.
Print Exibe os caracteres na janela de exibição atual.
Line Input Insere uma string pela janela de exibição atual.
Input # Permite que sejam recebidos dados de string ou numéricos de
um arquivo, uma porta de comunicação ou um banco de dados e
armazenados em uma ou mais variáveis.
Print # Gera dados para o arquivo, porta de comunicação, banco de
dados ou dispositivo especificado.
Line Input # Lê os dados de uma linha de um arquivo, porta de comunicação,
banco de dados ou do dispositivo.
Lof Verifica se a porta RS-232 ou TCP/IP especificada tem linhas
de dados em seu buffer.
SetIn Para IO virtual, define a porta de entrada (8 bits) especificada
no valor especificado.
SetInW Para IO virtual, define a palavra de entrada (16 bits)
especificada no valor especificado.
SetSw Para IO virtual, define o bit de entrada especificado no valor
especificado.
IOLabel$ Retorna o rótulo de I/O para um bit, um byte ou uma palavra de
entrada ou saída especificada.
IONumber Retorna o número da I/O do rótulo de I/O especificado.
IODef Retorna se o rótulo de I/O está definido ou não.
OpenCom Abre uma porta de comunicação RS-232.
OpenCom Function Adquire o número da tarefa que executa OpenCom.
CloseCom Fecha a porta RS-232C que foi aberta com OpenCom.
SetCom Define ou exibe os parâmetros da porta RS-232C.
ChkCom Retorna o número de caracteres no buffer de recepção de uma
porta de comunicação
OpenNet Abre uma porta de rede TCP/IP.
OpenNet Function Adquire o número da tarefa que executa OpenNet.
OutReal Gera os dados de saída do valor real como dado de ponto
flutuante (em conformidade com o IEEE754) de 32 bits para 2
palavras (32 bits) da porta de saída.
CloseNet Fecha a porta TCP/IP aberta previamente com OpenNet.
SetNet Define os parâmetros para uma porta TCP/IP.
ChkNet Retorna o número de caracteres no buffer de recepção de uma
porta de rede.
WaitNet Aguarda que a porta de conexão TCP/IP seja estabelecida.

Resumo dos comandos do SPEL+
EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1 9
Read Lê os caracteres de um arquivo ou porta de comunicação.
ReadBin Lê os dados binários de um arquivo ou porta de comunicação.
Write Escreve caracteres em um arquivo ou porta de comunicação
sem o terminador de fim de linha.
WriteBin Escreve dados binários em um arquivo ou porta de comunicação.
InputBox Exibe um prompt em uma caixa de diálogo, aguarda que o
operador insira texto ou escolha um botão e retorna o conteúdo
da caixa.
MsgBox Exibe uma mensagem em uma caixa de diálogo e aguarda que o
operador escolha um botão.
RunDialog Executa um diálogo do EPSON RC+ através de um programa
SPEL
+
.
LatchEnable Habilita/desabilita a função de engate da posição do robô pela
entrada R-I/O.
Função LatchState Retorna o estado de engate da posição do robô usando a R-I/O.
Função LatchPos Retorna a posição engatada do robô usando o sinal da entrada
R-I/O.
SetLatch Define a função de engate da posição do robô usando a entrada
R-I/O.
Função AIO_In Lê o valor analógico do canal de entrada de I/O analógico.
Função AIO_InW Lê o dado de entrada de uma palavra do canal de entrada de I/O
analógico.
AIO_Out Gera o valor analógico no canal de saída de I/O analógico.
Função AIO_Out Retorna o estado de saída do canal de saída de I/O analógico.
AIO_OutW Gera o dado de uma palavra para o canal de saída de I/O
analógico.
Função AIO_OutW Retorna o estado de saída por uma palavra do canal de saída de
I/O analógico.
AIO_Set Gera a informação da velocidade para o canal de saída de I/O
analógico.
Função AIO_Set Retorna a informação de configuração da saída da velocidade do
robô que está definida no canal de saída de I/O analógico opcional.
Comandos de gerenciamento de ponto
ClearPoints Apaga todos os dados de ponto da memória.
LoadPoints Carrega os dados de ponto de um arquivo na memória.
SavePoints Salva os dados de ponto para um arquivo na memória.
ImportPoints Importa um arquivo de pontos para o projeto atual para o robô
especificado.
ExportPoints Exporta um arquivo de pontos para o caminho especificado no PC.
P# Define um ponto especificado.
PDef Retorna o estado de definição de um ponto especificado.
PDel Exclui os dados de posição especificados.
PLabel Define um rótulo para um ponto especificado.
PLabel$ Retorna o rótulo do ponto associado a um número de ponto.
PNumber Retorna o número do ponto associado a um rótulo de ponto.
PList Exibe os dados de ponto na memória para o robô atual.
PLocal Define o atributo local de um ponto.
PDescription Define uma descrição do dado de ponto especificado.

Resumo dos comandos do SPEL+
10 EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1
PDescription$ Retorna a descrição do ponto que definiu o número do ponto
especificado
WorkQue_Add Adiciona os dados da fila de trabalho (dados de ponto e dados
do usuário) à fila de trabalho especificada.
WorkQue_AutoRemove Define a função de exclusão automática para a fila de
trabalho especificada.
Função WorkQue_AutoRemove Retorna o estado da função de exclusão automática
configurada para a fila de trabalho.
Função WorkQue_Get Retorna os dados de ponto da fila de trabalho especificada.
Função WorkQue_Len Retorna o número de dados da fila de trabalho válidos
registrados da fila de trabalho especificada.
WorkQue_List Exibe a lista de dados da fila de trabalho (dados de ponto e
dados do usuário) da fila de trabalho especificada.
WorkQue_Reject Define e exibe a distância mínima para prevenção do registro
duplo dos dados de ponto para a fila de trabalho especificada
Função WorkQue_Reject Retorna a distância da prevenção do registro duplo definida
para a fila de trabalho
WorkQue_Remove Exclui os dados da fila de trabalho (dados de ponto e dados
do usuário) da fila de trabalho especificada.
WorkQue_Sort Define e exibe o tipo de ordem para a fila de trabalho
especificada
Função WorkQue_Sort Retorna o tipo de ordem da fila de trabalho especificada
WorkQue_UserData Restabelece e exibe os dados do usuário (número real)
registrados na fila de trabalho especificada
Função WorkQue_UserData Retorna os dados do usuário (número real) registrados na fila
de trabalho especificada.
Comandos de alteração das coordenadas
Arm Define/retorna o braço atual.
ArmSet Define um braço.
ArmDef Retorna o estado de definição do braço.
ArmClr Apaga a definição de um braço.
Tool Define/retorna o número da ferramenta atual.
TLSet Define ou exibe um sistema de coordenadas da ferramenta.
TLDef Retorna o estado de definição da ferramenta.
TLClr Apaga a definição de uma ferramenta.
ECP Define/retorna o número do ECP atual.
ECPSet Define ou exibe um ponto de controle externo.
ECPDef Retorna o estado de definição do ECP.
ECPClr Apaga a definição de um ECP.
Base Define e exibe o sistema de coordenadas base.
Local Define um sistema de coordenadas local.
LocalDef Retorna o estado da definição local.
LocalClr Apaga (anula a definição) um sistema de coordenadas local.
Elbow Define/retorna a orientação do cotovelo de um ponto.
Hand Define/retorna a orientação da mão de um ponto.
Wrist Define/retorna a orientação do punho de um ponto.
J4Flag Define/retorna a configuração de J4Flag de um ponto.
J6Flag Define/retorna a orientação de J6Flag de um ponto.

Resumo dos comandos do SPEL+
EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1 11
J1Flag Define/retorna a configuração de J1Flag de um ponto.
J2Flag Define/retorna a orientação de J2Flag de um ponto.
J1Angle Define/retorna o atributo de J1Angle de um ponto.
J4Angle Define/retorna o atributo de J4Angle de um ponto.
VxCalib Cria os dados de calibração.
VxTrans Converte as coordenadas do pixel para coordenadas do robô
e retorna os dados de ponto convertidos.
VxCalInfo Retorna o estado de finalização da calibração/dados de
calibração.
VxCalDelete Exclui os dados de calibração.
VxCalSave Salva os dados de calibração no arquivo.
VxCalLoad Carrega os dados de calibração do arquivo.
Comandos de controle do programa
Function Declara uma função.
For...Next Executa uma ou mais instruções um número específico de
vezes.
GoSub Executa uma sub-rotina.
Return Retorna de uma sub-rotina.
GoTo Ramifica incondicionalmente com um número de linha ou
rótulo.
Call Chama uma função do usuário.
If..Then..Else..EndIf Execução de instrução condicional.
Else Usado com a instrução If para permitir que sejam executadas
instruções quando a condição usada com a instrução If é falsa.
Else é uma opção para a instrução If/Then.
Select ... Send Executa um dos vários grupos de instruções, dependendo do
valor de uma expressão.
Do...Loop Construção Do...Loop.
Declare Declara uma função externa em uma biblioteca de vínculo
dinâmico (DLL).
Trap Especifica um manipulador de interrupção.
OnErr Define um manipulador de erro.
Era Retorna o número da articulação do robô para o último erro.
Erf$ Retorna o nome da função para o último erro.
Erl Retorna o número da linha do erro.
Err Retorna o número do erro.
Ert Retorna o número da tarefa do erro.
Errb Retorna o número do robô do erro.
ErrMsg$ Retorna a mensagem de erro.
Signal Envia um sinal para as tarefas que estão executando WaitSig.
SyncLock Sincroniza as tarefas usando um bloqueio de exclusão mútuo.
SynUnlock Desbloqueia um ID de sincronização que foi previamente
bloqueado com SyncLock.
WaitSig Espera por um sinal de outra tarefa.

Resumo dos comandos do SPEL+
12 EPSON RC+ 7.0 (Ver.7.5) SPEL+ Language Reference Rev.1
ErrorOn Retorna o estado de erro do controlador.
Error Gera um erro do usuário.
EResume Retoma a execução após a finalização de uma rotina de
tratamento de erro.
PauseOn Retorna o estado de pausa.
Exit Sai de uma construção ou função de loop.
Comandos de execução de programa
Xqt Executa uma tarefa.
Pause Pausa todas as tarefas que têm pausa habilitada.
Cont Retoma o controlador após uma instrução Pause ser
executada e continua a execução de todas as tarefas.
Halt Suspende uma tarefa.
Quit Finaliza uma tarefa.
Resume Retoma uma tarefa no estado de suspensão.
MyTask Retorna a tarefa atual.
TaskDone Retorna o estado de finalização de uma tarefa.
TaskState Retorna o estado atual de uma tarefa.
TaskWait Aguarda que uma tarefa termine.
Restart Reinicia o grupo do programa principal.
Recover Executa a recuperação da posição de proteção e retorna o
estado.
RecoverPos Retorna a posição onde um robô estava quando a proteção de
segurança foi aberta.
StartMain Executa a função principal através de uma tarefa em segundo
plano.
Pseudoinstruções
#define Define uma macro.
#ifdef ... #endif Compilação condicional.
#ifndef ... #endif Compilação condicional.
#include Inclui um arquivo.
#undef Anula a definição de um identificador previamente definido
com #define.
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
A página está carregando...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
 302
302
-
 303
303
-
 304
304
-
 305
305
-
 306
306
-
 307
307
-
 308
308
-
 309
309
-
 310
310
-
 311
311
-
 312
312
-
 313
313
-
 314
314
-
 315
315
-
 316
316
-
 317
317
-
 318
318
-
 319
319
-
 320
320
-
 321
321
-
 322
322
-
 323
323
-
 324
324
-
 325
325
-
 326
326
-
 327
327
-
 328
328
-
 329
329
-
 330
330
-
 331
331
-
 332
332
-
 333
333
-
 334
334
-
 335
335
-
 336
336
-
 337
337
-
 338
338
-
 339
339
-
 340
340
-
 341
341
-
 342
342
-
 343
343
-
 344
344
-
 345
345
-
 346
346
-
 347
347
-
 348
348
-
 349
349
-
 350
350
-
 351
351
-
 352
352
-
 353
353
-
 354
354
-
 355
355
-
 356
356
-
 357
357
-
 358
358
-
 359
359
-
 360
360
-
 361
361
-
 362
362
-
 363
363
-
 364
364
-
 365
365
-
 366
366
-
 367
367
-
 368
368
-
 369
369
-
 370
370
-
 371
371
-
 372
372
-
 373
373
-
 374
374
-
 375
375
-
 376
376
-
 377
377
-
 378
378
-
 379
379
-
 380
380
-
 381
381
-
 382
382
-
 383
383
-
 384
384
-
 385
385
-
 386
386
-
 387
387
-
 388
388
-
 389
389
-
 390
390
-
 391
391
-
 392
392
-
 393
393
-
 394
394
-
 395
395
-
 396
396
-
 397
397
-
 398
398
-
 399
399
-
 400
400
-
 401
401
-
 402
402
-
 403
403
-
 404
404
-
 405
405
-
 406
406
-
 407
407
-
 408
408
-
 409
409
-
 410
410
-
 411
411
-
 412
412
-
 413
413
-
 414
414
-
 415
415
-
 416
416
-
 417
417
-
 418
418
-
 419
419
-
 420
420
-
 421
421
-
 422
422
-
 423
423
-
 424
424
-
 425
425
-
 426
426
-
 427
427
-
 428
428
-
 429
429
-
 430
430
-
 431
431
-
 432
432
-
 433
433
-
 434
434
-
 435
435
-
 436
436
-
 437
437
-
 438
438
-
 439
439
-
 440
440
-
 441
441
-
 442
442
-
 443
443
-
 444
444
-
 445
445
-
 446
446
-
 447
447
-
 448
448
-
 449
449
-
 450
450
-
 451
451
-
 452
452
-
 453
453
-
 454
454
-
 455
455
-
 456
456
-
 457
457
-
 458
458
-
 459
459
-
 460
460
-
 461
461
-
 462
462
-
 463
463
-
 464
464
-
 465
465
-
 466
466
-
 467
467
-
 468
468
-
 469
469
-
 470
470
-
 471
471
-
 472
472
-
 473
473
-
 474
474
-
 475
475
-
 476
476
-
 477
477
-
 478
478
-
 479
479
-
 480
480
-
 481
481
-
 482
482
-
 483
483
-
 484
484
-
 485
485
-
 486
486
-
 487
487
-
 488
488
-
 489
489
-
 490
490
-
 491
491
-
 492
492
-
 493
493
-
 494
494
-
 495
495
-
 496
496
-
 497
497
-
 498
498
-
 499
499
-
 500
500
-
 501
501
-
 502
502
-
 503
503
-
 504
504
-
 505
505
-
 506
506
-
 507
507
-
 508
508
-
 509
509
-
 510
510
-
 511
511
-
 512
512
-
 513
513
-
 514
514
-
 515
515
-
 516
516
-
 517
517
-
 518
518
-
 519
519
-
 520
520
-
 521
521
-
 522
522
-
 523
523
-
 524
524
-
 525
525
-
 526
526
-
 527
527
-
 528
528
-
 529
529
-
 530
530
-
 531
531
-
 532
532
-
 533
533
-
 534
534
-
 535
535
-
 536
536
-
 537
537
-
 538
538
-
 539
539
-
 540
540
-
 541
541
-
 542
542
-
 543
543
-
 544
544
-
 545
545
-
 546
546
-
 547
547
-
 548
548
-
 549
549
-
 550
550
-
 551
551
-
 552
552
-
 553
553
-
 554
554
-
 555
555
-
 556
556
-
 557
557
-
 558
558
-
 559
559
-
 560
560
-
 561
561
-
 562
562
-
 563
563
-
 564
564
-
 565
565
-
 566
566
-
 567
567
-
 568
568
-
 569
569
-
 570
570
-
 571
571
-
 572
572
-
 573
573
-
 574
574
-
 575
575
-
 576
576
-
 577
577
-
 578
578
-
 579
579
-
 580
580
-
 581
581
-
 582
582
-
 583
583
-
 584
584
-
 585
585
-
 586
586
-
 587
587
-
 588
588
-
 589
589
-
 590
590
-
 591
591
-
 592
592
-
 593
593
-
 594
594
-
 595
595
-
 596
596
-
 597
597
-
 598
598
-
 599
599
-
 600
600
-
 601
601
-
 602
602
-
 603
603
-
 604
604
-
 605
605
-
 606
606
-
 607
607
-
 608
608
-
 609
609
-
 610
610
-
 611
611
-
 612
612
-
 613
613
-
 614
614
-
 615
615
-
 616
616
-
 617
617
-
 618
618
-
 619
619
-
 620
620
-
 621
621
-
 622
622
-
 623
623
-
 624
624
-
 625
625
-
 626
626
-
 627
627
-
 628
628
-
 629
629
-
 630
630
-
 631
631
-
 632
632
-
 633
633
-
 634
634
-
 635
635
-
 636
636
-
 637
637
-
 638
638
-
 639
639
-
 640
640
-
 641
641
-
 642
642
-
 643
643
-
 644
644
-
 645
645
-
 646
646
-
 647
647
-
 648
648
-
 649
649
-
 650
650
-
 651
651
-
 652
652
-
 653
653
-
 654
654
-
 655
655
-
 656
656
-
 657
657
-
 658
658
-
 659
659
-
 660
660
-
 661
661
-
 662
662
-
 663
663
-
 664
664
-
 665
665
-
 666
666
-
 667
667
-
 668
668
-
 669
669
-
 670
670
-
 671
671
-
 672
672
-
 673
673
-
 674
674
-
 675
675
-
 676
676
-
 677
677
-
 678
678
-
 679
679
-
 680
680
-
 681
681
-
 682
682
-
 683
683
-
 684
684
-
 685
685
-
 686
686
-
 687
687
-
 688
688
-
 689
689
-
 690
690
-
 691
691
-
 692
692
-
 693
693
-
 694
694
-
 695
695
-
 696
696
-
 697
697
-
 698
698
-
 699
699
-
 700
700
-
 701
701
-
 702
702
-
 703
703
-
 704
704
-
 705
705
-
 706
706
-
 707
707
-
 708
708
-
 709
709
-
 710
710
-
 711
711
-
 712
712
-
 713
713
-
 714
714
-
 715
715
-
 716
716
-
 717
717
-
 718
718
-
 719
719
-
 720
720
-
 721
721
-
 722
722
-
 723
723
-
 724
724
-
 725
725
-
 726
726
-
 727
727
-
 728
728
-
 729
729
-
 730
730
-
 731
731
-
 732
732
-
 733
733
-
 734
734
-
 735
735
-
 736
736
-
 737
737
-
 738
738
-
 739
739
-
 740
740
-
 741
741
-
 742
742
-
 743
743
-
 744
744
-
 745
745
-
 746
746
-
 747
747
-
 748
748
-
 749
749
-
 750
750
-
 751
751
-
 752
752
-
 753
753
-
 754
754
-
 755
755
-
 756
756
-
 757
757
-
 758
758
-
 759
759
-
 760
760
-
 761
761
-
 762
762
-
 763
763
-
 764
764
-
 765
765
-
 766
766
-
 767
767
-
 768
768
-
 769
769
-
 770
770
-
 771
771
-
 772
772
-
 773
773
-
 774
774
-
 775
775
-
 776
776
-
 777
777
-
 778
778
-
 779
779
-
 780
780
-
 781
781
-
 782
782
-
 783
783
-
 784
784
-
 785
785
-
 786
786
-
 787
787
-
 788
788
-
 789
789
-
 790
790
-
 791
791
-
 792
792
-
 793
793
-
 794
794
-
 795
795
-
 796
796
-
 797
797
-
 798
798
-
 799
799
-
 800
800
-
 801
801
-
 802
802
-
 803
803
-
 804
804
-
 805
805
-
 806
806
-
 807
807
-
 808
808
-
 809
809
-
 810
810
-
 811
811
-
 812
812
-
 813
813
-
 814
814
-
 815
815
-
 816
816
-
 817
817
-
 818
818
-
 819
819
-
 820
820
-
 821
821
-
 822
822
-
 823
823
-
 824
824
-
 825
825
-
 826
826
-
 827
827
-
 828
828
-
 829
829
-
 830
830
-
 831
831
-
 832
832
-
 833
833
-
 834
834
-
 835
835
-
 836
836
-
 837
837
-
 838
838
-
 839
839
-
 840
840
-
 841
841
-
 842
842
-
 843
843
-
 844
844
-
 845
845
-
 846
846
-
 847
847
-
 848
848
-
 849
849
-
 850
850
-
 851
851
-
 852
852
-
 853
853
-
 854
854
-
 855
855
-
 856
856
-
 857
857
-
 858
858
-
 859
859
-
 860
860
-
 861
861
-
 862
862
-
 863
863
-
 864
864
-
 865
865
-
 866
866
-
 867
867
-
 868
868
-
 869
869
-
 870
870
-
 871
871
-
 872
872
-
 873
873
-
 874
874
-
 875
875
-
 876
876
-
 877
877
-
 878
878
-
 879
879
-
 880
880
-
 881
881
-
 882
882
-
 883
883
-
 884
884
-
 885
885
-
 886
886
-
 887
887
-
 888
888
-
 889
889
-
 890
890
-
 891
891
-
 892
892
-
 893
893
-
 894
894
-
 895
895
-
 896
896
-
 897
897
-
 898
898
-
 899
899
-
 900
900
-
 901
901
-
 902
902
-
 903
903
-
 904
904
-
 905
905
-
 906
906
-
 907
907
-
 908
908
-
 909
909
-
 910
910
-
 911
911
-
 912
912
-
 913
913
-
 914
914
-
 915
915
-
 916
916
-
 917
917
-
 918
918
-
 919
919
-
 920
920
-
 921
921
-
 922
922
-
 923
923
-
 924
924
-
 925
925
-
 926
926
-
 927
927
-
 928
928
-
 929
929
-
 930
930
-
 931
931
-
 932
932
-
 933
933
-
 934
934
-
 935
935
-
 936
936
-
 937
937
-
 938
938
-
 939
939
-
 940
940
-
 941
941
-
 942
942
-
 943
943
-
 944
944
-
 945
945
-
 946
946
-
 947
947
-
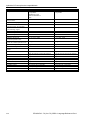 948
948
-
 949
949
-
 950
950
-
 951
951
-
 952
952
-
 953
953
-
 954
954
-
 955
955
-
 956
956
-
 957
957
-
 958
958
-
 959
959
-
 960
960
-
 961
961
-
 962
962
-
 963
963
-
 964
964
-
 965
965
-
 966
966
-
 967
967
-
 968
968
-
 969
969
-
 970
970
-
 971
971
-
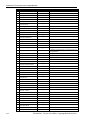 972
972
-
 973
973
-
 974
974
-
 975
975
-
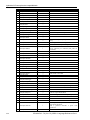 976
976
-
 977
977
-
 978
978
-
 979
979
-
 980
980
-
 981
981
-
 982
982
-
 983
983
-
 984
984
-
 985
985
-
 986
986
-
 987
987
-
 988
988




























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Artigos relacionados
-
Epson C4L Long Reach 6-Axis Robots Guia de usuario
-
Epson C12XL 6-Axis Robot Manual do usuário
-
Epson LS6 SCARA Robots Manual do usuário
-
Epson VT6L All-in-One 6-Axis Robot Manual do usuário
-
Epson IntelliFlex Feeding System Manual do usuário
-
Epson GX8B SCARA Robots Manual do usuário
-
-
-
Epson RC90B Controller Guia de instalação
-